
Aqui les dejo un video en el cual se muestra los desarrollos tecnológicos que se pueden realizar en el Tecnoparque Colombia.
Sistema Mecánico para Transporte de Café en Ladera
 Objetivo: Diseñar un sistema de transporte para la descarga de café en laderas del Huila.
Objetivo: Diseñar un sistema de transporte para la descarga de café en laderas del Huila.El proyecto se empezó a desarrollar a partir de la idea.
Este proyecto se está trabajando en conjunto con el ingeniero Carlos Ferney Reyes, el ingeniero Preminger Rubiano, el ingeniero Alexander y diseñador Elías Falla. Este es uno de los proyectos de los cuales se está trabajando direccionados por noroceagro para beneficio de la comunidad. Se instalará en la vereda del Sinaí en el municipio de Teruel. El proyecto se encuentra en fase de diseño.
Avance: Dentro del diseño de este proyecto se tiene ya definido: los tipos de cables que se usaran (el cable para sostener la carga y el cable para halar), se tiene un diseño para el cajón donde se transportará la carga, para este se está realizando un prototipo a escala para pruebas, se ha seleccionado el motor necesario para mover la carga y en base a la velocidad de desplazamiento se calculo un sistema de reducción. También se encuentran definidas las poleas necesarias para el cable de carga. En el momento se está diseñando un sistema de seguridad para las poleas.
Ladrillera ANDINA
Objetivo: Diseñar e implementar un control de temperatura para el horno Hoffman de la planta y diseñar y construir un sistema de conteo de ladrillos automatizado.
 Este proyecto nació en base a la necesidad del empresario, el cual tecnoparque nodo Neiva dará una solución al problema planteado.
Este proyecto nació en base a la necesidad del empresario, el cual tecnoparque nodo Neiva dará una solución al problema planteado.Este proyecto se encuentra bajo la asesoría de la línea de electrónica, automatización y control y la línea de mecatrónica del Tecnoparque Colombia Nodo Neiva. Se realizó una visita a la planta de producción de la empresa para el levantamiento de información, en la cual se evidenciaron dos problemas, uno que consiste en el conteo de los ladrillos de la producción, ya que esto se realiza manualmente. El otro problema se encuentra en el proceso de horneado del ladrillo, ya que el horno Hoffman que manejan en la planta no tiene un indicador de temperatura, lo cual conlleva a que los empleados terminen el horneado de los ladrillos intuitivamente. Esto un agravante para la producción, ya que el ladrillo puede terminar dañado.

Avance: En el momento, en base a los problemas planteados y la información recolectada, se está investigando para realizar el sistema de automatización y el costo de los elementos necesarios para conocimiento del emprendedor.
Robots USCO
Objetivo: Diseñar y construir robots para diferentes tipos de competencias para torneos de robótica.
 En el marco del torneo de robótica “Sigue la Línea” organizado por el Tecnoparque Colombia Nodo Neiva, se realizaron diferentes asesorías y actividades de aprendizaje en conjunto con los asesores de la línea de electrónica con los estudiantes de la USCO para la construcción de los robots que participarían en el torneo. Adicionalmente, se realizaron asesorías con grupos que no participaron en el torneo. Los diferentes grupos de estudiantes de ingeniería electrónica estuvieron trabajando en las instalaciones del Tecnoparque por aproximadamente dos semanas. De aquí, se culminaron diferentes robots para estas competencias.
En el marco del torneo de robótica “Sigue la Línea” organizado por el Tecnoparque Colombia Nodo Neiva, se realizaron diferentes asesorías y actividades de aprendizaje en conjunto con los asesores de la línea de electrónica con los estudiantes de la USCO para la construcción de los robots que participarían en el torneo. Adicionalmente, se realizaron asesorías con grupos que no participaron en el torneo. Los diferentes grupos de estudiantes de ingeniería electrónica estuvieron trabajando en las instalaciones del Tecnoparque por aproximadamente dos semanas. De aquí, se culminaron diferentes robots para estas competencias.Avance: Se construyeron los siguientes prototipos: ocho robots laberintos, tres robots sumo, tres robots seguidores de línea y un robot rastreador.
Semillero Robótica USCO
Objetivo: Formar emprendedores capaces de desarrollar proyectos productivos para nuestro departamento.
Con el grupo del semillero de robótica se ha venido trabajando desde principio de este año. Cuenta con 16 emprendedores hasta la fecha. Este semillero ha venido realizando diferentes proyectos, entre los cuales se encuentran la pagina del semillero, robots para competencias (sumo, seguidor de línea y laberinto) y algunos otros proyectos. La página del semillero se encuentra terminada, pero no ha sido montada a la web. Los robots vienen siendo trabajados por diferentes emprendedores del grupo, los cuales han ido diseñando y realizando pruebas de los mismos como método de estudio. Además de los proyectos que el semillero ha trabajado, se han realizado investigaciones concretas en temas específicos de la robótica, con lo cual los emprendedores han complementado sus conocimientos en los temas de la electrónica y la mecánica.
Avance: Además de las actividades de aprendizaje realizadas con este grupo (programación de microcontroladores y sistemas reductores) y de las diferentes investigaciones en temas específicos relacionados con la robótica, el semillero de investigación se encuentra realizando tres proyectos de robots para competencias (robot sumo, seguidor de línea y laberinto), estos proyectos tienen realizados sus respectivos circuitos electrónicos y se está trabajando en la programación de cada uno de ellos.
Semillero ROBINTEL CORHUILA
Objetivo: Formar emprendedores capaces de desarrollar proyectos productivos para nuestro departamento.
Este grupo ha ido trabajando constantemente en el aprendizaje de la robótica, ya que siendo estudiantes de ingeniería de sistemas, deben empezar con lo más básico. Se han ido realizando proyectos electrónicos que están dentro de sus capacidades.
Avance: Dentro de las investigaciones de este semillero, los emprendedores han realizado dos circuitos electrónicos, un contador de uno a diez y una calculadora para las operaciones de suma y resta.
Secador de grano
Objetivo: Diseñar y construir un secador de grano artificial.
 Proyecto recibido en idea.
Proyecto recibido en idea.El emprendedor, estudiante del instituto Politécnico Americano recibió asesorías en cuanto a la construcción del prototipo (diseño electrónico y programa de control en LabView).
Avance: Se realizó el diseño del circuito, la programación del microcontrolador y el programa de control en Labview. Se realizaron pruebas con un prototipo a escala con buenos resultados. El proyecto se da por finalizado.

Banda Transportadora
Objetivo: Diseñar y construir una banda transportadora para múltiples usos industriales.
 Este proyecto se recibió en idea.
Este proyecto se recibió en idea.El emprendedor realizó diferentes asesorías y actividades de aprendizaje en cuanto al diseño de la estructura y a la selección de sensores. Por cuestiones logísticas, este proyecto fue ensamblado y probado en Palermo, ya que el emprendedor radica en esta ciudad.
Avance: Se diseño y se construyo una banda transportadora para transporte de material metálico.

Brazo Robótico - Robotino
Objetivo: Diseñar un brazo robótico para la competencia de Wordskill.
 Este fue un proyecto direccionado por el ingeniero Carlos Felipe Dussan y trabajado en conjunto con el diseñador Elías Falla, el cual consistía en el diseño de un brazo robótico que los aprendices necesitaban para la competencia Wordskill. Se realizó una lluvia de ideas para el diseño, con el cual se seleccionó el más apropiado para la competencia.
Este fue un proyecto direccionado por el ingeniero Carlos Felipe Dussan y trabajado en conjunto con el diseñador Elías Falla, el cual consistía en el diseño de un brazo robótico que los aprendices necesitaban para la competencia Wordskill. Se realizó una lluvia de ideas para el diseño, con el cual se seleccionó el más apropiado para la competencia.Avance: Se diseñó del brazo robótico para la competencia.

Control de Flujo de Gas para Hornos de Arcilla
 Objetivo: Consiste en diseñar e implementar un control de temperatura automatico para hornos de fundición.
Objetivo: Consiste en diseñar e implementar un control de temperatura automatico para hornos de fundición.Este proyecto se encuentra lidearado por la línea de electrónica. automatización y control, articulado con uno de los emprendedores del semillero de energias alternativas.
Avance: Se diseño el sistema de empalme entre un motor y la llave de gas, con el cual se podrá controlar el paso del gas.
Clasificación y transformación de residuos sólidos vegetales
 Objetivo: Diseñar y construir una planta con capacidad para 3 toneladas día para la transformación de residuos sólidos vegetales.
Objetivo: Diseñar y construir una planta con capacidad para 3 toneladas día para la transformación de residuos sólidos vegetales.Este proyecto se recibió en idea, aunque el emprendedor tenía una concepción del diseño de la planta.
Se han ido realizando diferentes asesorías en cuanto a la maquinaria necesaria para la construcción de la planta.
Avance: Se planteo un proceso completo de la fabrica necesaria para el proceso de transformación. El emprendedor se encuentra realizando múltiples cotizaciones de las maquinas. Al terminar este compromiso adquirido por el emprendedor, se ejecutará el plan de trabajo para la construcción de las maquinas que hagan falta.
Motor Stirling
Objetivo: Diseñar y construir un motor prototipo que funciona en base a los cambios de temperatura de un gas (termodinámica) sin generar contaminantes.
 Proyecto recibido en idea.
Proyecto recibido en idea.Proyecto que se está manejando con el ingeniero Juan Carlos Perdomo. Siendo un proyecto sumamente innovador y complejo, este proyecto tiene una fase inicial investigativa, la cual ha ido siendo desarrollada por el emprendedor, con acompañamiento del Tecnoparque Colombia Nodo Neiva.
Avance: Se realizó diferentes actividades de aprendizaje en el tema de la termodinámica. Se estudiaron diferentes modelos de motores para el prototipo. El emprendedor se encuentra realizando una tabla comparativa de materiales según su tipo de conducción calorífica.
Troqueladora de Flores
Objetivo: Diseñar y construir una Troqueladora de flores para vestidos típicos del Huila.
 Proyecto recibido en idea, como una necesidad del empresario.
Proyecto recibido en idea, como una necesidad del empresario.Para este proyecto se han realizado varios diseños, los cuales están en estudio de costos y viabilidad. Este proyecto se ha articulado con ATM Services para el uso de sus instalaciones para la construcción de la maquina.
Avance: El aporte de la línea de mecatrónica con este proyecto, básicamente se basa en el planteamiento de posibles diseños para la maquina Troqueladora.

Brazo Robótico para Uso Industrial
 Objetivo: Diseñar y construir un brazo robótico para uso industrial.
Objetivo: Diseñar y construir un brazo robótico para uso industrial.El proyecto se recibió en idea.
Se realizó una investigación previa, en la cual lo emprendedores entendieron los diferentes usos los cuales podría tener el brazo. Se realizaron actividades de aprendizaje en los temas importantes de la robótica.
Avance: Actividad de aprendizaje en robótica. Se definió el tipo de motores y el control de mando del brazo y cantidad de grados de libertad (6 grados).
Auto Solar
 Objetivo: Diseñar y construir un automóvil con capacidad para dos personas que será impulsado por energía solar.
Objetivo: Diseñar y construir un automóvil con capacidad para dos personas que será impulsado por energía solar.El proyecto se recibió en idea.
Se realizó una actividad de aprendizaje con respecto a los múltiples tipos de energías alternativas. El emprendedor realiza la investigación sobre el tipo de motores que puede usar y su costo.
Avance: Diseño del automóvil (se definió con barras de acero, tipo boogie, tipo de llantas, tipo de transmisión de fuerza del motor), se realizó una actividad de aprendizaje en energías alternativas, ya que el emprendedor quiere aprovechar algunos otros recursos no contaminantes, para generar más movimiento en el carro. Se diseño un sistema seguidor solar.
Otros Proyectos Asesorados en el Segundo Trimestre
Automatización de cortinas; Control Industrial de Maquinaria Inteligente; Pagina web sobre problemas intrafamiliares, Maquina Troqueladora para Fabricación de Amarres Metálicos.
Proyectos Instituto Politécnico Americano
Carro de energía solar inteligente; Plataforma móvil de pantógrafo; automatización de barras de ingreso para parqueaderos; automatización para puertas de garajes.
Proyectos Gimnasio La Fragua
Generador de Van Der Graff, Carro con energía solar, Efectos de la resonancia, Motor a base de pila eléctrica, Dispensador Automático para Mascotas, Carro seguidor de luz.
Torneo de Robótica "Sigue la Línea"
En el mes de Junio se realizó en el Tecnoparque nodo Neiva el segundo torneo de robótica "Sigue la Línea", el cual contó con participantes provenientes de la universidad Surcolombiana, el Instituto Politécnico Americano, Colegio Campestre y aprendices del SENA de la titulada de Mantenimiento electrónico.

En el torneo participaron robots en las categorias de seguidores de línea, sumo, rastreadores y laberinto. Se tuvo una participación de mas de 25 personas entre los 12 robots participantes.


Los participantes del torneo desde días anteriores, trabajaron arduamente en las instalaciones del tecnoparque, haciendo pruebas y corrigiendo errores. Al final, se vieron los resultados de estos emprendedores en las competencias, creando un torneo muy emocionante para el publico.

El evento premió a los mejores robots de cada categoria con premios entregados por nuestros patrocinadores, Comcel, Solusolde, EnergyRam, Avena Maná y Bocaditos Mexicanos.
 Con este tipo de eventos, el tecnoparque nodo Neiva espera poder encender la llama del emprendimiento en los huilenses.
Con este tipo de eventos, el tecnoparque nodo Neiva espera poder encender la llama del emprendimiento en los huilenses.Teletón y Creatón
Tecnoparque Colombia también piensa en el medio ambiente. Teniendo por el difícil momento el cual está pasando nuestro planeta, Tecnoparque, aporta su granito de arena al medio ambiente con el evento Teletón y Creatón.



Este evento consistió en la recolección de basura electrónica para luego ser reutilizada por los participantes del evento. Los participantes lograron realizar proyectos muy interesantes sacando elementos de estos desechos.



El evento tuvo gran acogida por parte de los emprendedores del Tecnoparque Colombia Nodo Neiva, donde se tuvo la participación de mas de 20 emprendedores y se premiaron los tres mejores proyectos.

Taller Fischer Technik
La línea de mecatrónica del Tecnoparque Colombia Nodo Neiva, los invita a participar en los diferentes talleres de Fischer Technik, en los cuales, de una forma muy sencilla se puede aprender sobre el tema de robótica.
A continuación se muestra imagenes de algunos de los talleres de Fischer Technik.




Para mayor información sobre estos talleres, por favor comunicarse al numero 8670078 o directamente en las instalaciones del Tecnoparque Colombia Nodo Neiva, con el asesor encargado de la Línea de Mecatrónica.
VideoConferencia TecnoParque
Se invita a todos los interesados que el día Miércoles 22 de Abril a las 4:00 p.m. se realizará la videoconferencia ""Como Desarrollar un Proyecto de Electrónica Desde su Concepción Hasta el Desarrollo del Prototipo" en las instalaciones de TecnoParque Nodo Neiva.

Esperamos su participación.
Taller Sensores y Actuadores - Politécnico
El día Viernes 17 de Abril se desarrollo un taller sobre Sensores y Actuadores realizado por las líneas de Mecatrónica y de Electrónica, Automatización y Control con los alumnos del Instituto Politécnico de Neiva de Electrónica y Electromecánica.
En este espacio de 4 horas, los estudiantes del Politécnico conocieron sobre los diferentes tipos de sensores y actuadores que se utilizan en la industria por medio de ejemplos simples.

Este taller tuvo gran acogida entre los estudiantes del Instituto, ya que ellos mismos le pidieron a los asesores la realización de un nuevo taller, en el cual se implementará la programación de este tipo de dispositivos.

Además de esto, esperamos realizar otros tres talleres de este tipo con este mismo Instituto, con diferentes semestres.

Con este tipo de talleres, TecnoParque Nodo Neiva espera fomentar el emprendimiento en las Universidades, Institutos, Colegios y demás centros de formación del país, para así poder, en un futuro poder competir a nivel de tecnología con las potencias mundiales.
Videos Tablero Virtual
Aqui les dejo un video subido en youtube en el cual podemos ver la manipulación del tablero virtual, explicado por el mismo Johnny Chung Lee, creador de este sistema.
Hagamos nuestro propio tablero interactivo
Desde hace mucho tiempo, un joven emprendedor llamado Johnny Chung Lee de Estados Unidos graduado en Ingeniería Eléctrica y Sistemas de la Universidad de Virginia (University of Virginia) actualmente estudiando un Ph.D. en Interacción Humano-Computadora en CMU (Carnegie Mellon University) de Pittsburgh (Pennsylvania). Johnny ha investigado mucho sobre la interacción de las personas con las computadoras, lo cual lo llevo al estudio del wiimote (Control interactivo que utiliza la consola Nintendo Wii) con el cual ha desarrollado diferentes software, estos se encuentran en su blog personal para descarga y uso de cualquier persona totalmente gratis. Para nuestro caso utilizaremos este software y desarrollaremos un tablero virtual.
Primero debemos desarrollar la interfaz de comunicación, la cual se hace por medio del wiimote y un dispositivo bluetooth. Para esto debemos tener un control de wii (wiimote) y un computador con conexión bluetooth, si este no la tiene internamente, debemos utilizar un adaptador bluetooth, el cual se puede conectar por USB (debemos tener en cuenta que no todos los dispositivos no son compatibles con el software). Además de lo anterior, necesitaremos un software que lo podemos encontrar totalmente gratis en la siguiente página de internet: http://www.bluesoleil.com/download/index.asp
El software se encuentra con el nombre BlueSoleil 6. Este software es el que sincronizará el wiimote con el computador. Para mayor información de cómo realizar esto podemos visitar la siguiente página web: http://www.instructables.com/id/SUV1ZFKFBJIMSDN/
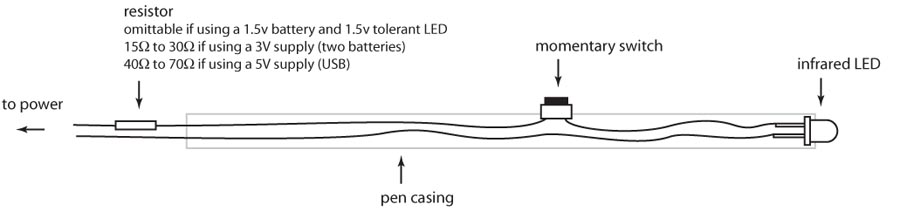
El siguiente paso para nuestro tablero es la construcción del lápiz óptico, el cual manejará nuestro puntero, podríamos nombrarlo como nuestro mouse virtual. Este lápiz permitirá manipular el puntero del mouse en diferentes superficies. Los materiales que se necesitan son: 1 LED infrarojo, 1 switch normalmente abierto, 1 resistencia de 30 ohmios, 2 baterias AA (1,5 V cada una), cable y soldadura de estaño. Para darnos una mejor idea podemos encontrar el plano en: http://johnnylee.net/projects/wii/pen.jpg
Luego de tener listo nuestro lápiz óptico, es hora de probarlo. Para esto debemos descargar un nuevo software, el cual fue diseñado por Johnny Chung Lee, este software (wiimote whiteboard v0.3) es posible descárgalo en la página web: http://johnnylee.net/projects/wii/
En esta página podemos encontrar también un video de cómo funciona el tablero explicado por su mismo creador. También podemos encontrar el código del software que Johnny desarrollo para aquellos programadores interesados en ayudarlo a mejorar este sistema.
Recordemos que para hacer funcionar nuestro tablero virtual debemos llevar siempre los siguientes pasos:
· Realizar la sincronización via bluetooth del wiimote.
· Correr el ejecutable del wiimote whiteboard.
Con esto tenemos un tablero virtual muy parecido a los que se encuentran en el mercado de forma muy económica.
Primero debemos desarrollar la interfaz de comunicación, la cual se hace por medio del wiimote y un dispositivo bluetooth. Para esto debemos tener un control de wii (wiimote) y un computador con conexión bluetooth, si este no la tiene internamente, debemos utilizar un adaptador bluetooth, el cual se puede conectar por USB (debemos tener en cuenta que no todos los dispositivos no son compatibles con el software). Además de lo anterior, necesitaremos un software que lo podemos encontrar totalmente gratis en la siguiente página de internet: http://www.bluesoleil.com/download/index.asp
El software se encuentra con el nombre BlueSoleil 6. Este software es el que sincronizará el wiimote con el computador. Para mayor información de cómo realizar esto podemos visitar la siguiente página web: http://www.instructables.com/id/SUV1ZFKFBJIMSDN/
El siguiente paso para nuestro tablero es la construcción del lápiz óptico, el cual manejará nuestro puntero, podríamos nombrarlo como nuestro mouse virtual. Este lápiz permitirá manipular el puntero del mouse en diferentes superficies. Los materiales que se necesitan son: 1 LED infrarojo, 1 switch normalmente abierto, 1 resistencia de 30 ohmios, 2 baterias AA (1,5 V cada una), cable y soldadura de estaño. Para darnos una mejor idea podemos encontrar el plano en: http://johnnylee.net/projects/wii/pen.jpg
{kind=link}
Luego de tener listo nuestro lápiz óptico, es hora de probarlo. Para esto debemos descargar un nuevo software, el cual fue diseñado por Johnny Chung Lee, este software (wiimote whiteboard v0.3) es posible descárgalo en la página web: http://johnnylee.net/projects/wii/
En esta página podemos encontrar también un video de cómo funciona el tablero explicado por su mismo creador. También podemos encontrar el código del software que Johnny desarrollo para aquellos programadores interesados en ayudarlo a mejorar este sistema.
Recordemos que para hacer funcionar nuestro tablero virtual debemos llevar siempre los siguientes pasos:
· Realizar la sincronización via bluetooth del wiimote.
· Correr el ejecutable del wiimote whiteboard.
Con esto tenemos un tablero virtual muy parecido a los que se encuentran en el mercado de forma muy económica.